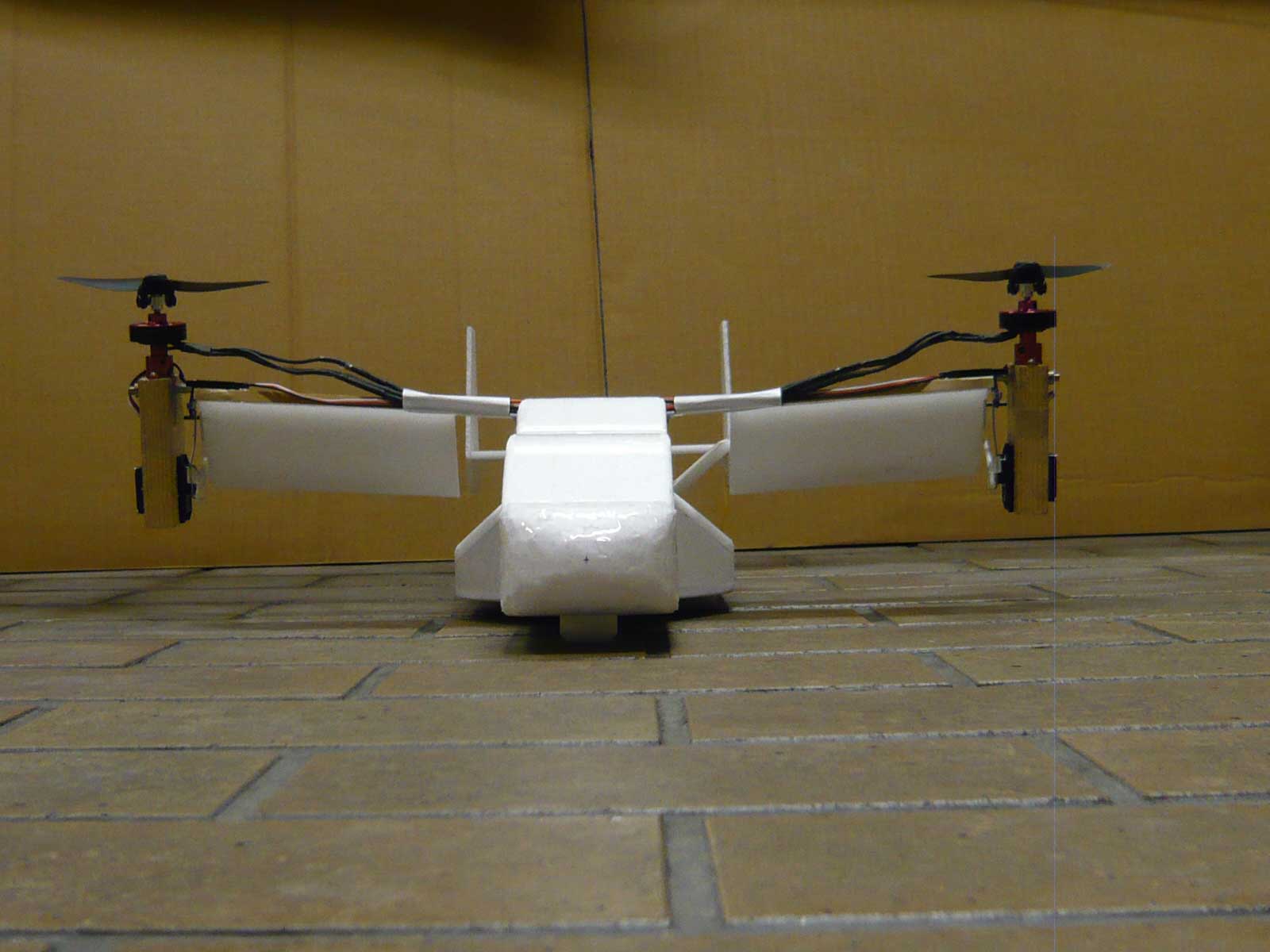
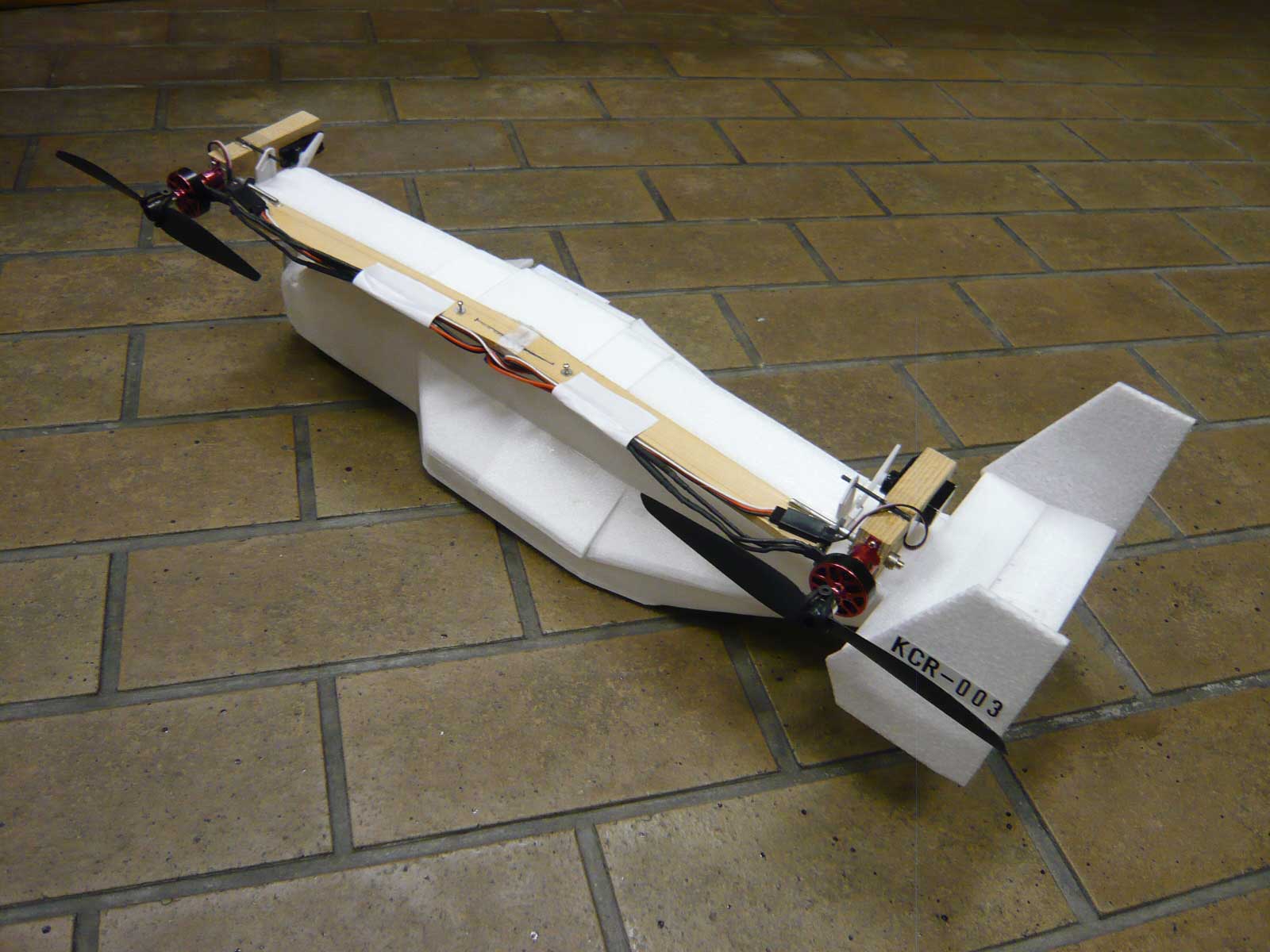
デコパネV-22オスプレイ 浮上
固定ピッチのツインコプターをベースとした小さなオスプレイを作ってみました。



回転翼モードでの機体制御にはマルチコプター用6軸ジャイロユニットを使用。
「Hobbyking KK2.0 Multi-rotor LCD Flight Control Board」
マルチコプターは初めてですが、トルクロールの師匠yasuo840さんがツインも含め多数製作されていてアドバイスを頂きました。
「回転翼モード⇔固定翼モード」の転換が構造的にも制御的にも難しく問題山積みでしたが、どうにか完成が見えてきました。
ツインコプターは主にチルト軸と重心の距離を利用してエレベーター軸モーメントを生み出しますが、オスプレイのスケール機ではこの距離を稼ぐ事が難しく、制御を邪魔する慣性モーメントや空力モーメントも大きく、サイクリックピッチコントロール無しではエレベーター軸の制御が不安定になる事が予想されました。
またモード転換についてもサイクリック無しでは転換中に効果的な操縦が効かず不安定になる事が予想されます。
ナセルチルトは操舵も含め150度ほどの動作角が必要ですがホバリングに使うのはその1/4程なので、ジャイロ制御に必要な分解能が得られるかどうかも不明。
まあ単純な機体だしコントロールボード以外は手持ちの機材で行けそうだったので、とにかく作ってデータを取る事に。
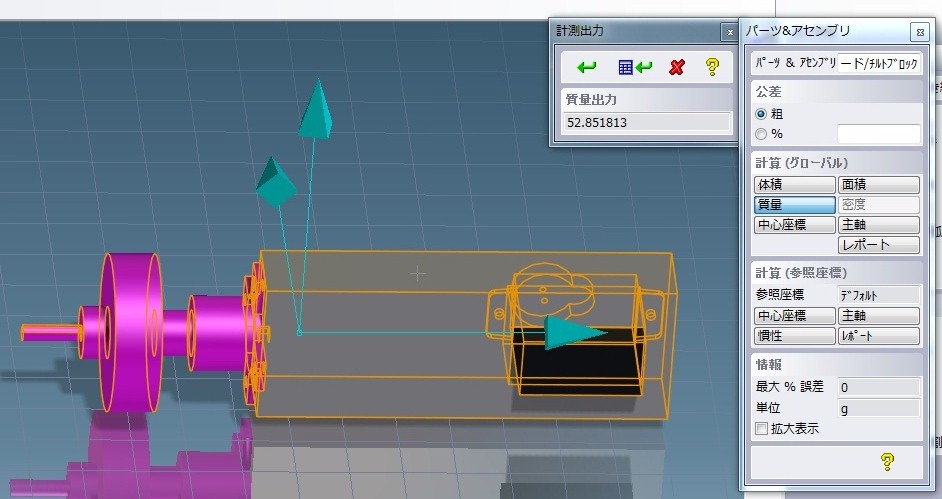
例によってフリーの3Dcadで画を描きましたが、斜めパネルやチルトメカの構想、ユニット毎の重心確認など、こういう機体では3Dcadは便利。
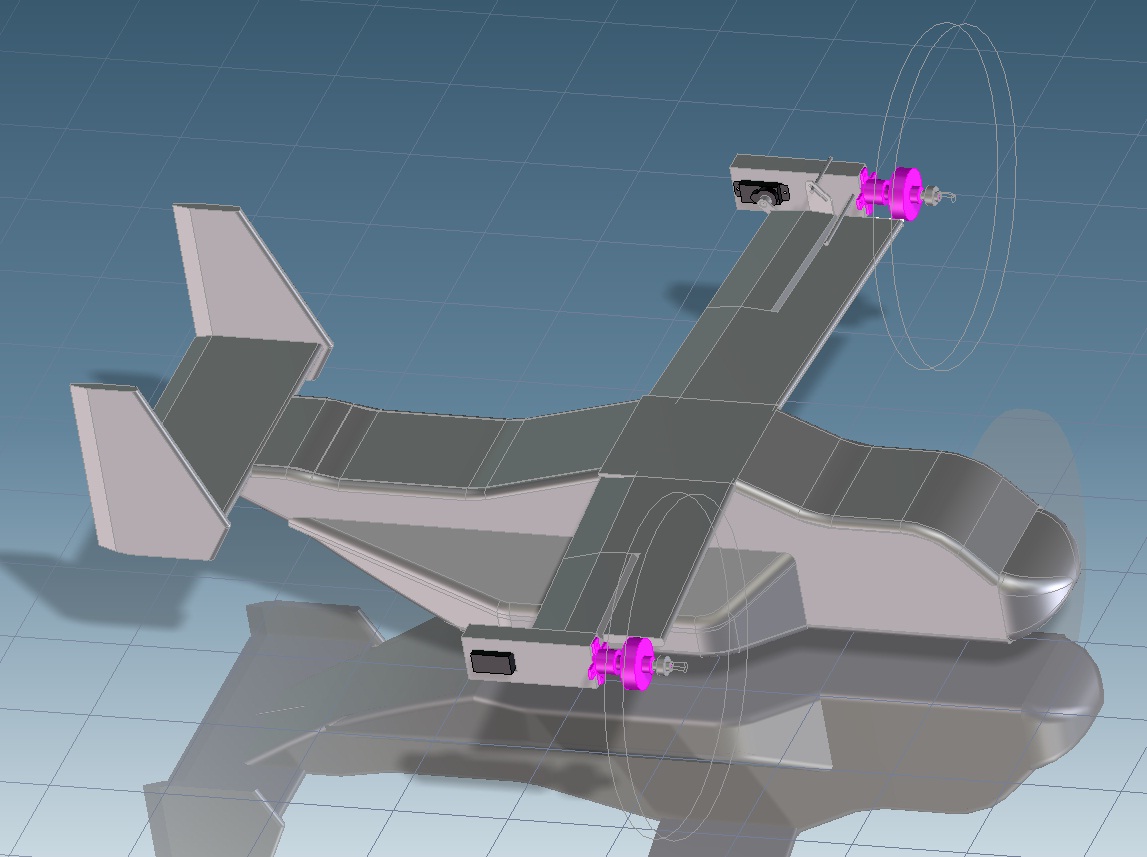
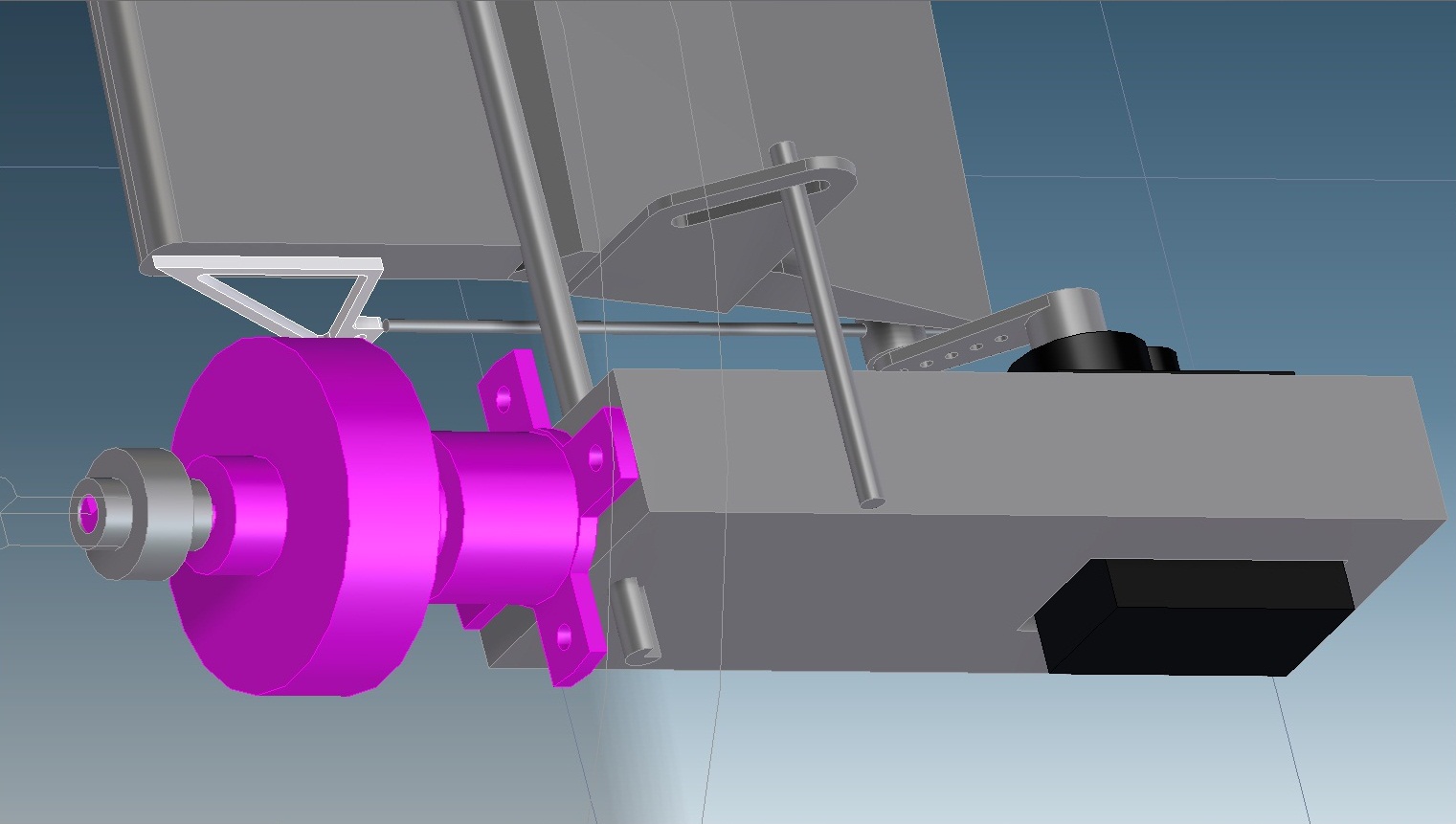
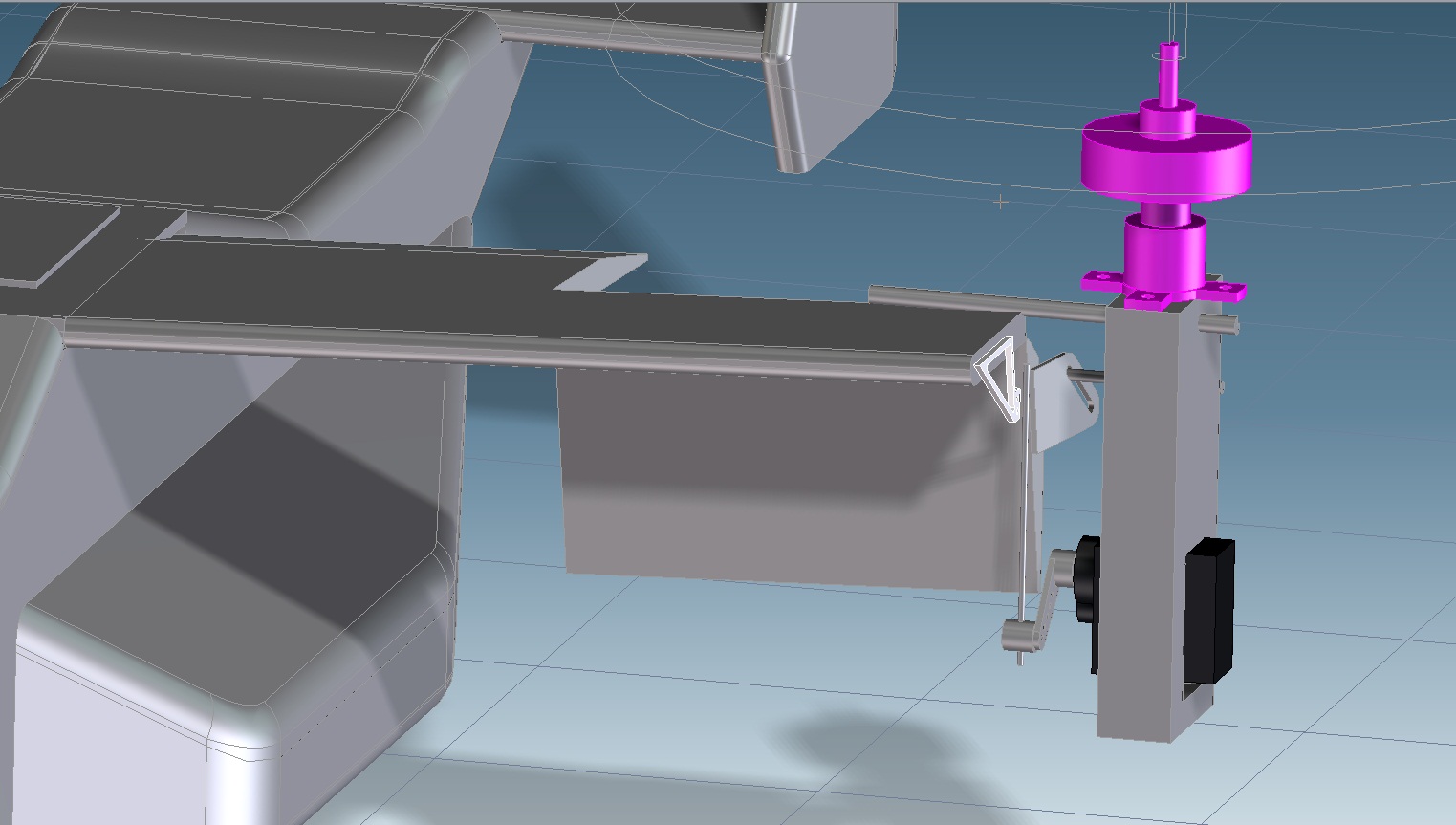
可動部分、強度構造部分はチルト機構周りに集中していますが、150度ほどの動作角を確保しつつ精度も必要で、主翼は曲げ、捻じれ剛性が求められます。
サーボは搭載スペースと重量バランスを考えナセルに搭載。
FreeWingの9gクラス、引込脚用120度動作タイプの物ですが最大170度ほど動作するのでリンク比は1:1。
チルト軸と軸受けはステンレス丸棒とアルミパイプ、主翼桁は5mm厚ヒノキ材、接合部はカーボン&和紙補強。
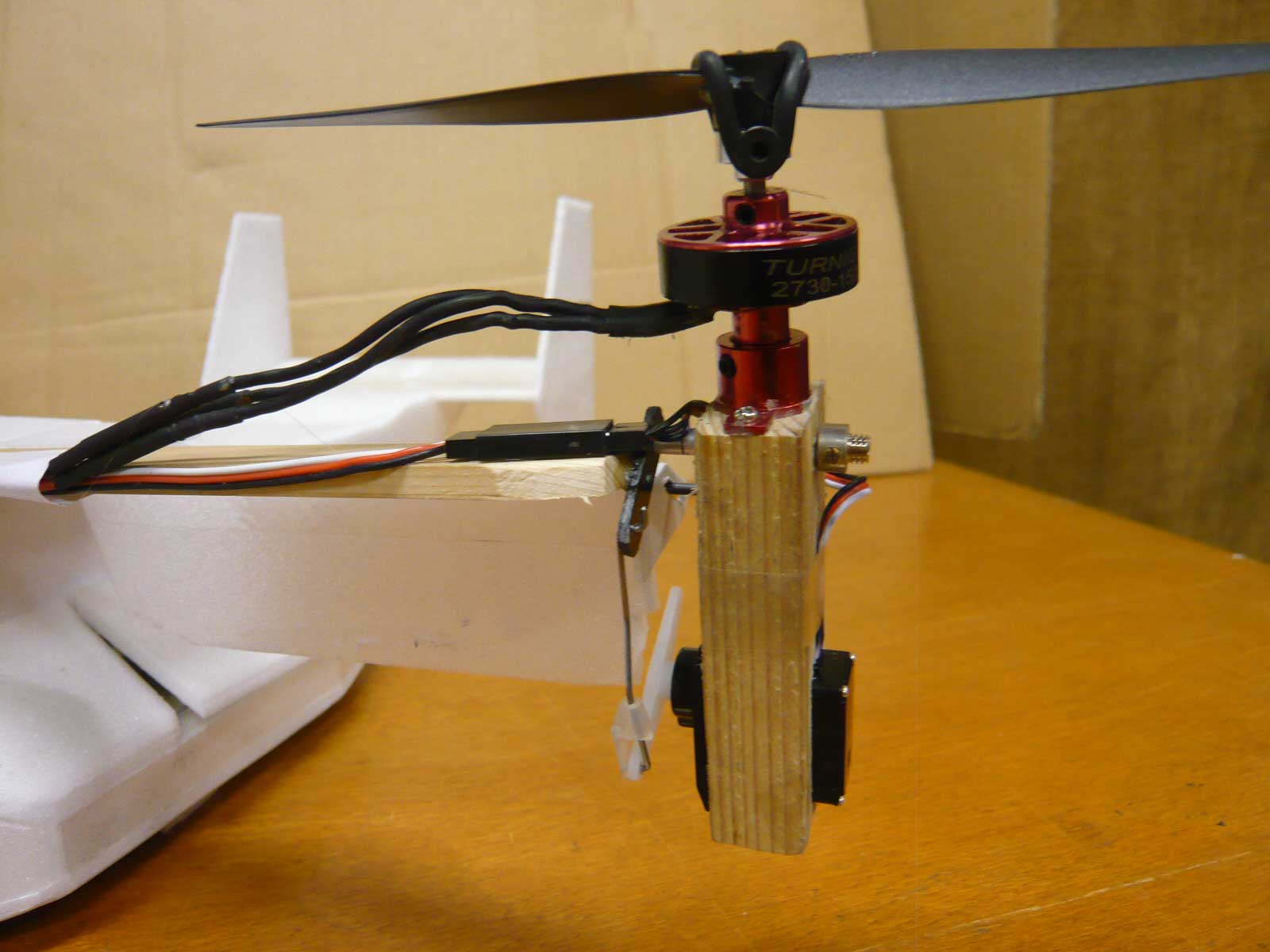
まず最低限の部品をセロハンテープで留めてホバリングを試してみましたが、フラつきながらもあっさり浮上。

セルフレベリングモード(加速度センサーONの6軸制御)ではホバリングのフラつきが1/3程になるので迷わずON。
予想通りピッチ方向の制御が不安定だったため、主翼桁を作り直しチルト軸位置を10mmほど上へ移動したところ少し改善し、ゲインを上げることが出来ました。
(フラッペロンと軸芯のズレが大きくなりリンケージが少し複雑に)
回転翼モードではフラッペロンを降ろすとペラ後流の邪魔にならず推力効率が上がりますが、これがけっこうなピッチダウンモーメントを発生し重心位置を変更しなければならないので要注意。
(舵面取り付け前はチルト軸を手で持って持ち上げたのと同じ姿勢でホバリング)
左右重心位置は多少狂っていても自動補正されますが、前後重心位置はホバリング姿勢に直結します。
フラッペロンによるピッチダウンモーメントはさらに後退推力を発生させるのでスロットルからエレベーターへ補正ミキシング。
さてここからが大変。
KK2.0コントロールボードが届いてみて分かったのですが、期待していたリモートゲイン機能は現行V1.2ファームウェアでは非対応。
固定翼モードでは制御方向もジャイロ感度も全く異なるので仕方なくBプランへ、タミヤのマイクロスイッチを4つ並べてサーボで各chの信号線を物理的に受信機直結に切り替える事に。
プロポ内のモード切り替えとマイクロスイッチ切り替えに微妙な時間差があり、受信機直結時にプロポでミキシングしてしまうとモード切り替え時の信号位置が大きくズレてしまうので、GWSのサーボミキサーを2つ使用。
ESCからのBEC電源はそれぞれ1Aしかないので、チルトサーボのみ別系統にして電力を独立供給。
という訳でメカ配線は少々面倒な事になってます。
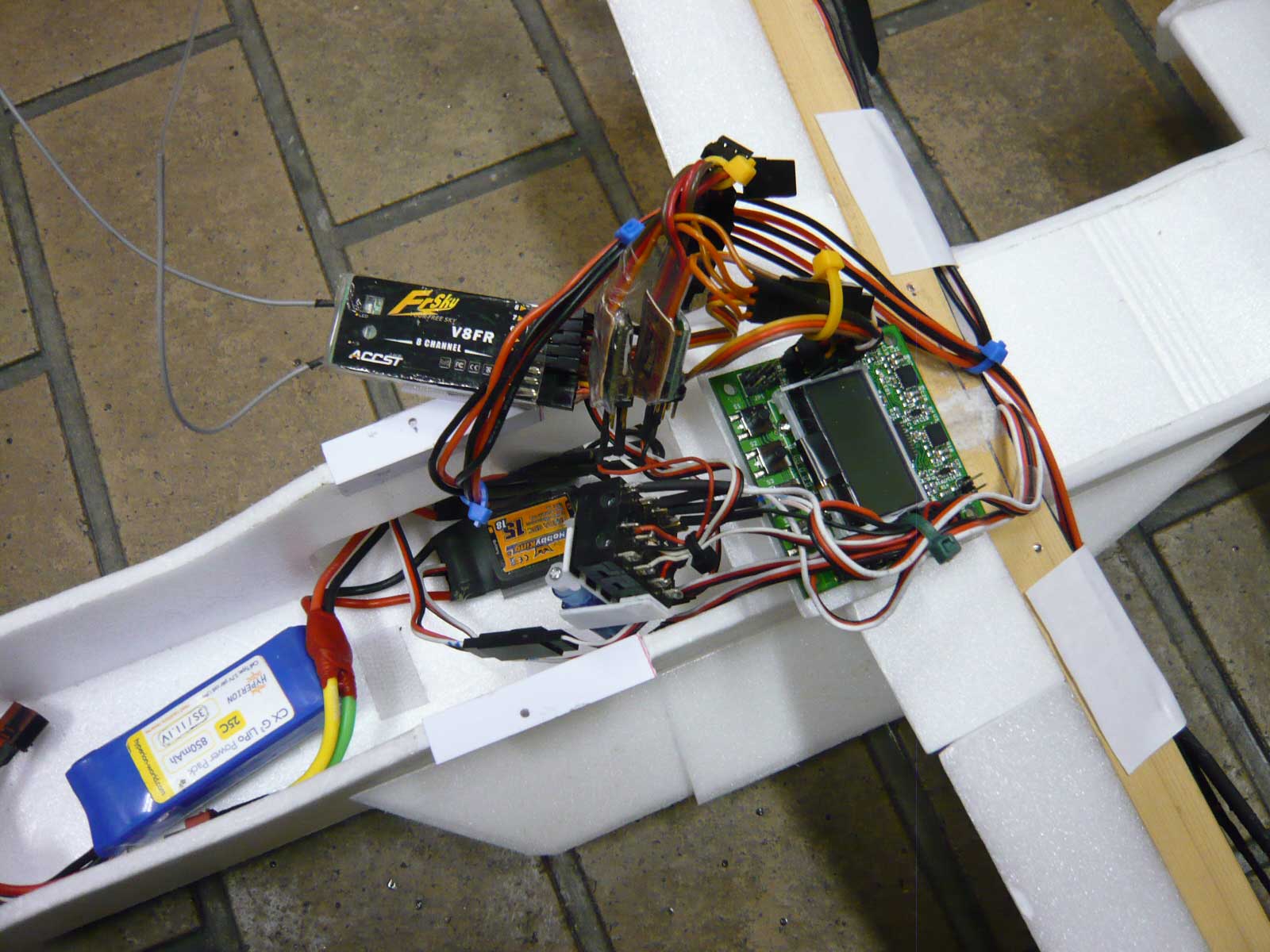
重量増もスイッチ、ミキサー、サーボ等で30gほど、リモートゲイン機能さえあればと思いますが仕方ありません。
サーボミキサーでは最終出力chのリミットが直接設定できず、スロットル+操舵でESCchに過大入力が入りESCのフルハイポイントが自動修正されてしまうので、9Xの機能を使ってスロットル+操舵で操作量に応じてスロットルchを絞るよう設定。
サーボによるマイクロスイッチ切り替えとプロポのモード切り替えの間の僅かな時間差を無くすためモード切り替えに0.4秒のディレイを掛けましたが、標準機能の0.5秒刻みでは調整しきれないのでディレイを掛けた空きchに仮想スイッチを設定し0.005秒刻みで設定。
固定翼モードから回転翼モードへの転換でジャイロ制御された出力信号に機械的に切り替えると、作動を続けていたヘッドロック制御のニュートラルがズレている事になるので、これも上記ディレイ設定同様にしてスイッチ操作に連動し自動的に0.1秒間ほど最スローにして一瞬待機モードに入れ、ヘッドロック制御を初期化。
このとき十分に減速してからジャイロ制御を開始しないと尾翼エレベーターとジャイロ制御が喧嘩すると思われるので、チルト軸を立ててジャイロ制御をOFFにした転換モードを設定。
プロポ設定は、制御が全く異なる飛行機1機、ツインコプター1機、中間一機のデータを飛行中に切り替えるような状態なので、カスタム9Xの強力なミキシング機能が威力を発揮。
機体の制御系統は複雑に変化しますが操縦は普通のヘリ、飛行機と同様の操作で可能となりました。
(実機と違い回転翼モードでスロットルが逆になる事もありません)
あと主翼は取り外せるので格納状態も再現可能?
今のところテストは室内ホバリングまで。
安定性は現状だと出来の悪いヘリくらいですが、ジャイロのセッティングでまだまだ改善出来そう。
実機同様ダウンウォッシュが強いようで、ペラ直径は18cmですが1m位まで上昇しないと地面効果の乱気流で安定しませんが、地面効果圏を抜ければピタホバ出来ます。
調整が甘いとけっこうなスピードで流されるので固定翼機モードへの転換に必要な速度まで加速するのは難しくないと思われますが、問題は減速側でしょうか。
ペラ径が小さ目なので実機と違い固定翼モードでの着陸も可能となっています。
固定翼モードでの重心は、主翼前縁長で調整出来なければチルト軸位置を修正する事になるでしょう。
高翼低重心の反転双発機なので空力安定性が良く翼端失速にも強いはずですが翼面荷重は実機同様かなり高め、胴体揚力に期待。
機体をなるべく壊さないよう、上空テストをどのように進めるかが悩み所です。
今回はモード転換を欲張って難しくなってますが、回転翼モードのみと割り切って背高&短胴のチョロQスタイルにディフォルメすれば製作も簡単でツインコプターとしての飛行性能も上がるのでそちらの方が楽しいかもしれません。
縦にしてCH-46、47等の前後タンデムヘリを再現しても面白そうだし、ツインコプターはスケール機にいろいろ応用が利きそう。
動力ユニットが2つとサーボ2つで良いので、可動部さえ自作すれば費用も安く済みます。
デコパネオスプレイデータ
スケール : 1/35
全長 : 500mm
全幅 : 440mm
翼幅 : 376mm(ナセル除く)
軸間 : 412mm
主翼面積 : 229.36cm2
飛行重量 : 420g(現状)
翼面荷重 : 1.83g/cm2
モーター: TURNIGY2730(1500KV) ×2発
ペラ : ホビキン、パチGWS 7×3.5 カウンターローテーション
ESC : ホビキン15A ×2
リポ : ハイペリ3セル850mah25C ×1
サーボ : FreeWing120度動作×2(KKhobby)、HXT500×1、ホビキン4.3g×1
フライトコントローラー : 「Hobbyking KK2.0 Multi-rotor LCD Flight Control Board」
最大静止推力左右計750g
(各13000rpm、左右計16A)
KK2.0購入時は受信機接続用の両オスケーブルもお忘れなく。
受信機は普通の5ch以上の物でOKですが、CPPM機能対応のコレ等を使うと全8chを使って全ての機能が使える上にKK2.0基板との接続もケーブル1本でOK、受信機自体も小型軽量。
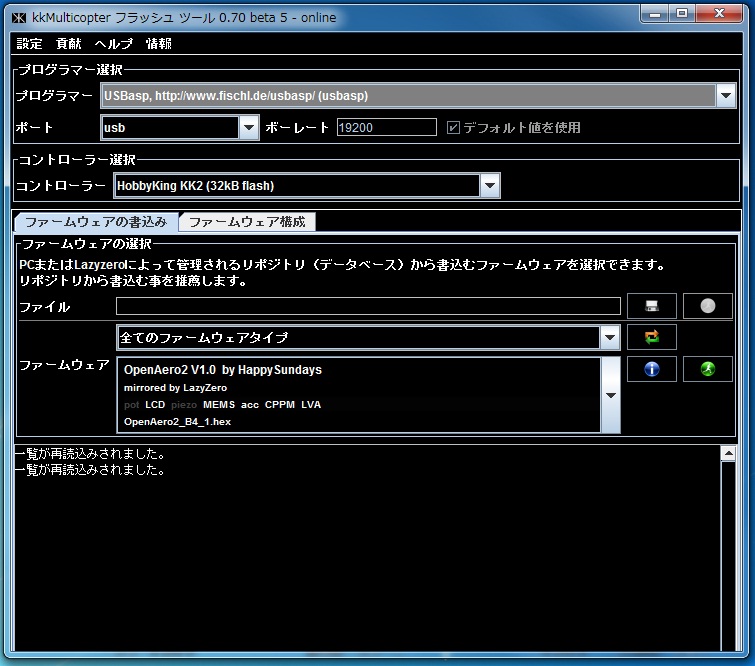
追記:
現在はフライトコントローラーのファームウェアを改良版OpenAero2に書き換え、4.3gサーボ、マイクロスイッチ、サーボミキサーは不要になっています。