ER9xプロポでバタフライミキシング
なかなか時間が取れません、当選したPHOENIX2000はとりあえずミキシングを組んでみました。
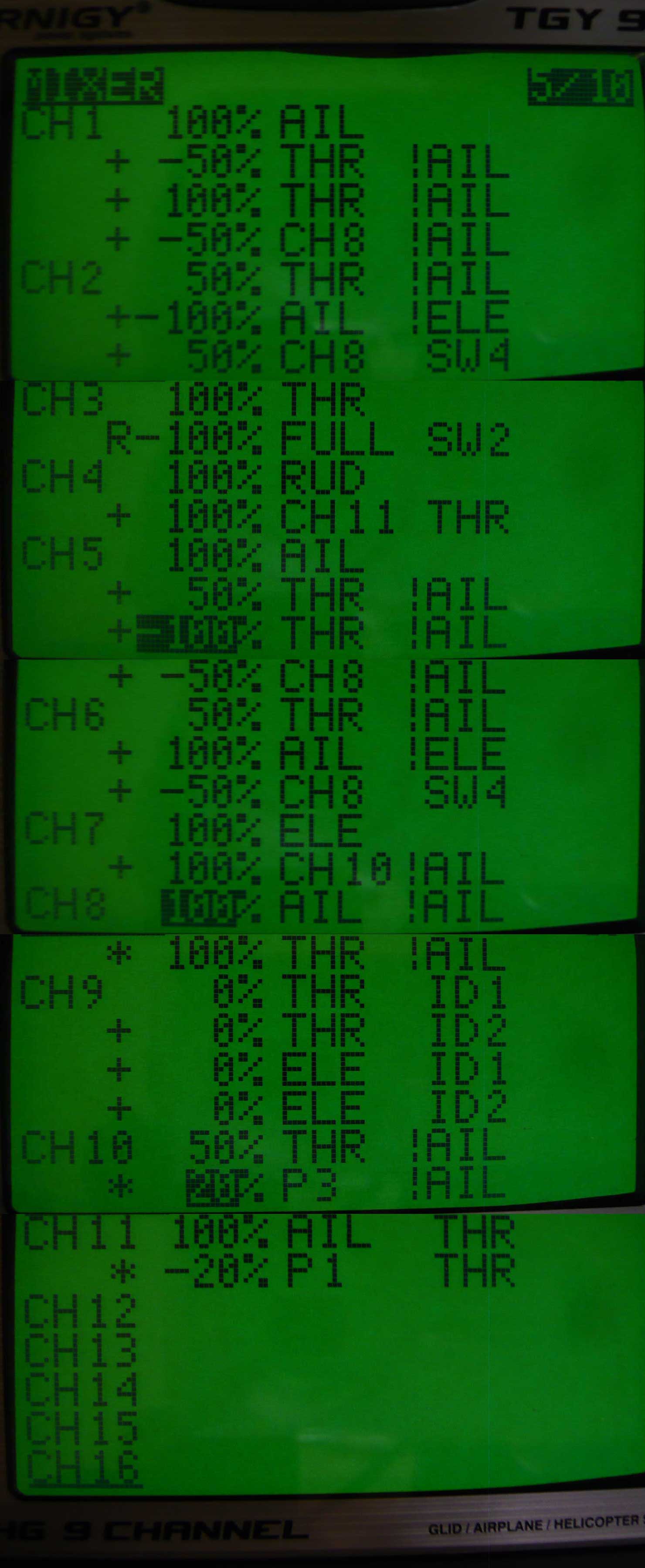
主翼の4サーボを活かしER9xでバタフライ(クロウ)、フルエルロン、キャンバー調整を組み合わせたクアトロ動作を設定。
(冒頭はサーボスローとサーボディレイ機能を組み合わせた自動操作デモ)
設定テンプレートにもグライダーは無いのでゼロから入力していきます。
ミキシングの内容としては基本の3舵とESCの他に
○ スロットルスティックでバタフライ動作をコントロール
○ バタフライ中もエルロンはフルストローク動作
○ バタフライON/OFFに関わらずフルエルロン(フラップをエルロンとしても使用)のON/OFFが出来るように。
○ フライトモード毎にスロットルトリムでキャンバーコントロール。
さらに癖取り用のミキシングとして
バタフライ → エレベーター(ボリューム調整)
エルロン → ラダー(ON/OFFスイッチ+ボリューム調整)
バタフライミキシングは内翼のフラップを下げ、外翼のエルロンを上げとして翼端失速を防ぎつつエアブレーキを掛ける動作。
単純にミキシングを掛けるとバタフライ最大時のエルロンストロークが半分になってしまうので、バタフライ動作量の増加に合わせてエルロン作動量が最大2倍に増えるように追加ミキシングしエルロン一杯で両エルロンがフルストロークするように設定。
それからフラップをエルロンに連動させるフルエルロン動作のON/OFFを設定し、これも外翼エルロン同様の設定でバタフライ開度に関わらずフルストロークのフルエルロン動作。
フラップサーボは全ての動作で下げ側が大きく、上げ側が小さくなるようリミット設定で差動を付け、ネジリ下げ状態に。
(ちなみにASW28でエルロンを両方ダウンにしてフラップにならないか実験してみた時は主翼がネジリ上げ状態になって翼端失速しやすくなり、下反角が付いたように不安定に)
さらにフルスパンの動翼を使いフライトモード毎に翼型のキャンバーを「ノーマル」「スピード」「低速滞空」とスロットルトリムで調整出来るよう設定。
バタフライ動作のソースはスロットルスティックなのでバタフライミキシング中はスロットルトリムで4枚の舵面を動かせますが、外翼のエルロンは動かしたい方向と逆に動いてしまう為、エルロンにトリムOFFの逆方向2倍量ミキシングを掛けトリムのみを逆転。
(ESCチャンネルもトリムOFFにしておきます)
各モードにはエレベーターフライトモードトリムも追加。
こういう設定をする時などER9xはサブトリムの可動域が大きくニュートラルをリミット位置までオフセット出来るので便利。
バタフライブレーキ操作はスロットル操作と同じ感覚で行えるよう、スロットルスティック最スローでバタフライ最大(=ブレーキ最大)。
フライト中に複雑なスイッチ操作が必要だと間違えやすいのでバタフライ操作はスロットルスティックに常時割り当てとし(ON/OFFスイッチは設定)、別スイッチでモーターのスロットルスティック連動のみをON/OFFする事にします。
標準形態のモーターグライダーの着陸では折りペラ保護のため低高度ではモーター停止、舵面保護のため下面に飛び出すフラップは着地寸前に格納。
本機の着陸進入はモータースイッチOFFでバタフライによるブレーキコントロールのみで行い、もしパワーが必要になってしまった時はスイッチONしてまたすぐにOFFに戻し、着地寸前にスティックフルハイ(バタフライOFF)とする事にします。
フルハイで着陸というのは普通の機体と違うので混乱しないよう要注意。
ちなみにASW28の場合ブレーキは小さなエルロンのハネ上げしか無いので効きが弱く、コレだけで目標地点に降ろす事はやや困難。
なのでスロットルスティック上部1/4でモーター操作、下部1/2でスポイラー操作としてモーターも使いつつ進入角を調整。
(着地の瞬間はスティック最スロー)
設定にあたりER9xのE.Limits機能をON、これでLimits画面でリミット(最大動作量)100%を125%まで増やせるようになり、サーボの動作範囲が広がり精度、分解能、トルクをより引き出せます。
(但し移動距離が増えるのでフル操舵までのスピードは低下、またサーボ側の動作範囲を超えていないか要確認)
設定を行う時の注意点として、プロポによりリミット(エンドポイント)の働き方が違うという事。
ER9xではどんな設定をしてもLimits画面で設定したリミット以上にサーボが動く事はなく、ミキシングを重ねてもサーボはリミット位置で止まるので過剰動作によって機体にダメージ与える危険は小。
しかしサブトリム値を変更してもリミット値は連動移動ぜず、操舵の+側と-側でセンターからリミット値までの距離に差ができ差動が付くカタチになるので、大きくトリム調整したらリミット値も調整してバランスを取る必要あり。
また動作範囲はE.Limits機能を使っても125%まで、サーボ自体は140%付近まで反応する物が多いようなのでサーボの限界までは使い切れません。
FF7ではトリム値を変更すると全体の動作がそのカタチのまま平行移動するので差動が付いたりといった事は無し。
しかしトリムやミキシング、D/Rによりリミット値を超えて動作するので、不感領域が出来たり可動限界を超え機体を破損させる恐れがあり注意が必要。
動作範囲はリミットとD/Rを組み合わせればサーボ自体の限界以上に設定出来るのでギリギリのセッティングが可能。
いろんなメーカーのプロポを使うと少しややこしい。。。
といった感じで、ここまでで設定したミキシング30個、設定したカスタムスイッチ4個、メモリー消費302、設定してみればたったこれだけの動きですが、実際のフライトを想定してなるべく使いやすく簡潔に・・・と考えるとなかなか悩めます。。
しかし複雑に動く舵面は見ているだけで楽しいです。
とりあえずやりたいと思った基本設定は全部出来たので、あとは飛ばしながらの煮詰め。
全ての入出力やミキシングでカーブ設定が自由に適用できるので細かな癖取りも可能だと思われます。
フルファンクションのグライダーで細かい事を言い出すと複雑なミキシングが要求されるので、FF7では手も足も出ないし10chクラスのプロポでもセッティングに制約がある事が多いみたいですが、ER9xは上記程度なら自由に設定できるのでやはり良く出来たプロポなんじゃないかと思います。
おかしな所、お気づきの点があったら教えて下さい(汗“
機体の方はメカも搭載済みだしストレート組みならすぐに完成ですが、良く飛ぶ機体との事なので要所を補強しつつしっかり組みたいと思います。